Multi-Agent Cooperative Transportation Control of a Quadrotor Lifting System
At a Glance
-
Software License

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. -
Key Stakeholders
Primary Developer - Cade Coker; Intelligent System Lab Members; Undergraduate, Postgraduate Engineering students, Robotics and AI Researchers
-
Resources
MATLAB/Simulink – High Performance Computer – Field-Programmable Gate Array (FPGA)/Microcontrollers – Quadrotor Drones
-
Budget
The project is currently funded through ISL and its partners.
-
Features• Real time formation adjustment for load distribution among quadrotor agents • Load swing suppression of a payload tethered by flexible, elastic cables
-
![]()
Quadrotor Unmanned Aerial Vehicles (QUAVs) form a popular platform for tethered payload transportation due to their agility, ability to precisely hover, and their Vertical Take-Off and Landing (VTOL) capabilities. These vehicles however, are limited by their carrying capability. Comparatively, Multi-Agent Systems (MASs) of several smaller QUAVs have a greater capability to transport heavier payloads. Real time formation control of an MAS of QUAVs is crucial for ensuring an optimal load distribution, which prevents premature agent failure. Multi-Agent tethered payload transportation systems are also subjected to possible inter-agent collision and position error due to the pendulum-like behavior of the payload, necessitating a load swing suppression technique. This project therefore aims to develop and implement an adaptive formation controller and individual agent controllers for the real time adjustment of UAV load distribution, and minimization of the tethered payloads swing for a Multi-Agent UAV Lifting System.
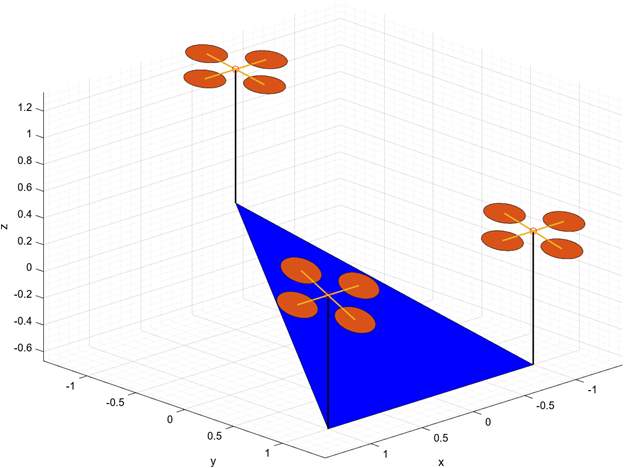
Quadcopter Swarm
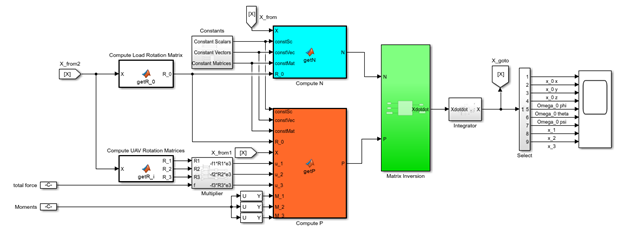
Control Blocks